Crazy Legs
|
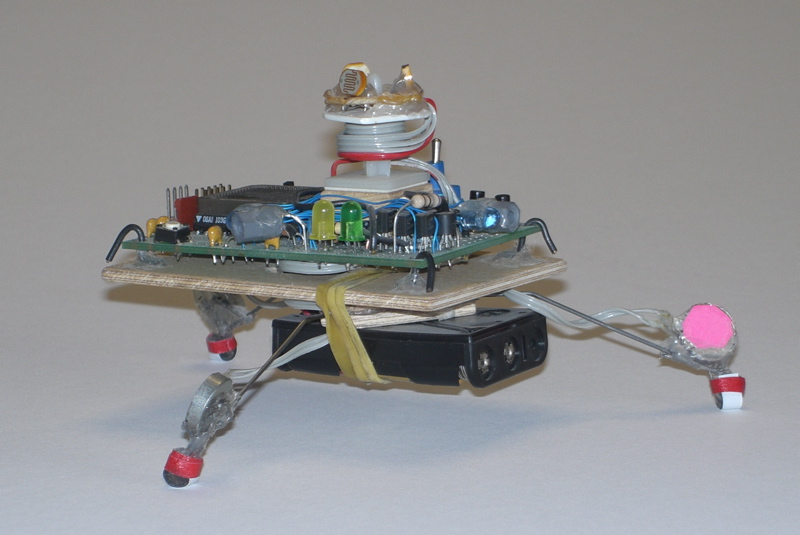
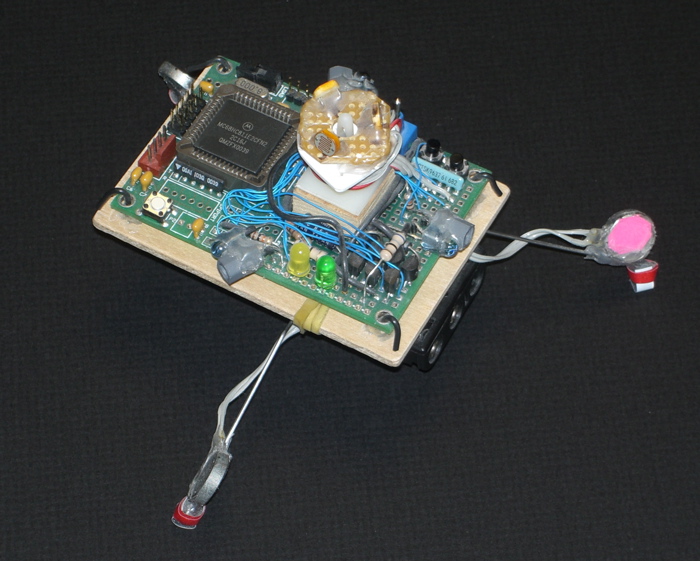
Crazy Legs has three legs, but it doesn't walk it just shuffles.
Each leg is a bent piece of music wire with
a pager vibrator motor (discs at end of leg) and a small pad on its foot.
Each motor is mounted at an angle so that when it vibrates it moves in a particular direction.
When all three motors are on, Crazy Legs just spins around in place. When one motor is turned off, it will pivot around that foot. By turning just one motor off at a time in sequence it can move in whatever direction it wants to. It has three upward looking photo sensors mounted on a knob on top. By turning the knob to point at leg number one (the one with the pink spot) it can be set to go toward light. Point the knob away from leg one, and it will go away from light. Or it can be set to go at any angle to the light, or spiral around the light source. It has three outward looking reflective infrared proximity sensors, for avoiding obstacles. Each leg is associated one of the proximity sensors, when that sensor has the highest proximity indication that legs motor is turned off, causing the bot to move away from the obstacle. Crazy Legs is controlled by a 68HC11e2 on a BotBoard Plus circuit board. |
Crazy Legs Egg Sucker
ERC
Hexex
LC
Mutant
Speedy
Theseus
Thumper
T3
Egg Sucker
ERC
Hexex
LC
Mutant
Speedy
Theseus
Thumper
T3
Back to Robot Projects
Back to Home
Fractal Creations
K'nex Creations
Site Index
Privacy Policy
Copyright
Contact
Copyright 1994 -
Gary Teachout