HexEx
The Hexapod Experiment
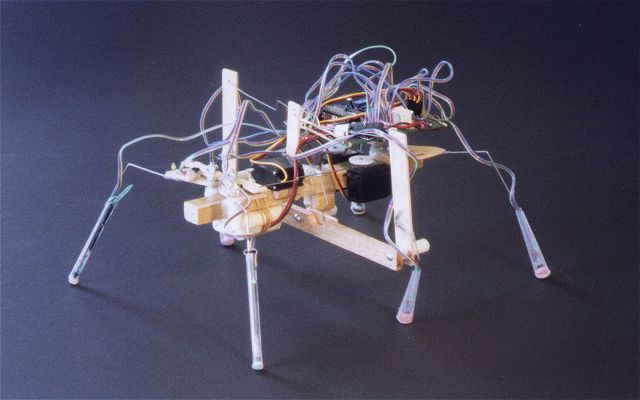
| A six legged insectoid about 15" long, 12" wide, and 8" high, with about 2" of ground clearance. It has three standard servos driving the legs. Controlled by a 68HC11 microcontroller on a BotBoard 2. Each foot has a switch to sense when it touches the ground. |
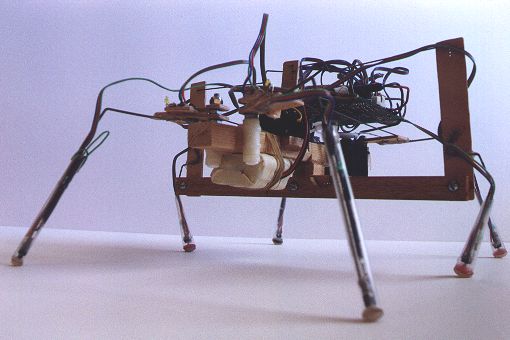
| This thing is unstable to the point of being useless. As long, wide, and low as it is, it still flips over on any uneven surface. After experimenting with it for a while I decided a legged machine needs better leg articulation, good sensors, and a mind (or very good software) to decide where to step. |
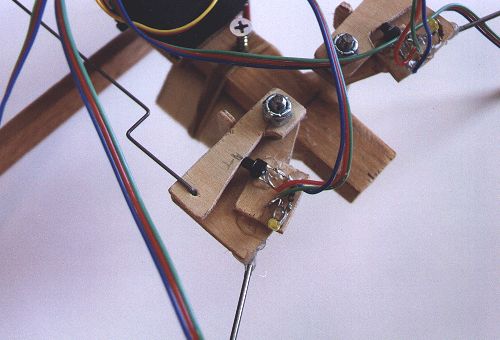
| One feature that did work very well is the leg feeler switch pictured above. As it takes a step the front leg that is up acts as feeler to detect obstacles as it sweeps forward. |
Crazy Legs Egg Sucker
ERC
Hexex
LC
Mutant
Speedy
Theseus
Thumper
T3
Egg Sucker
ERC
Hexex
LC
Mutant
Speedy
Theseus
Thumper
T3
Back to Robot Projects
Back to Home
Fractal Creations
K'nex Creations
Site Index
Privacy Policy
Copyright
Contact
Copyright 1994 -
Gary Teachout